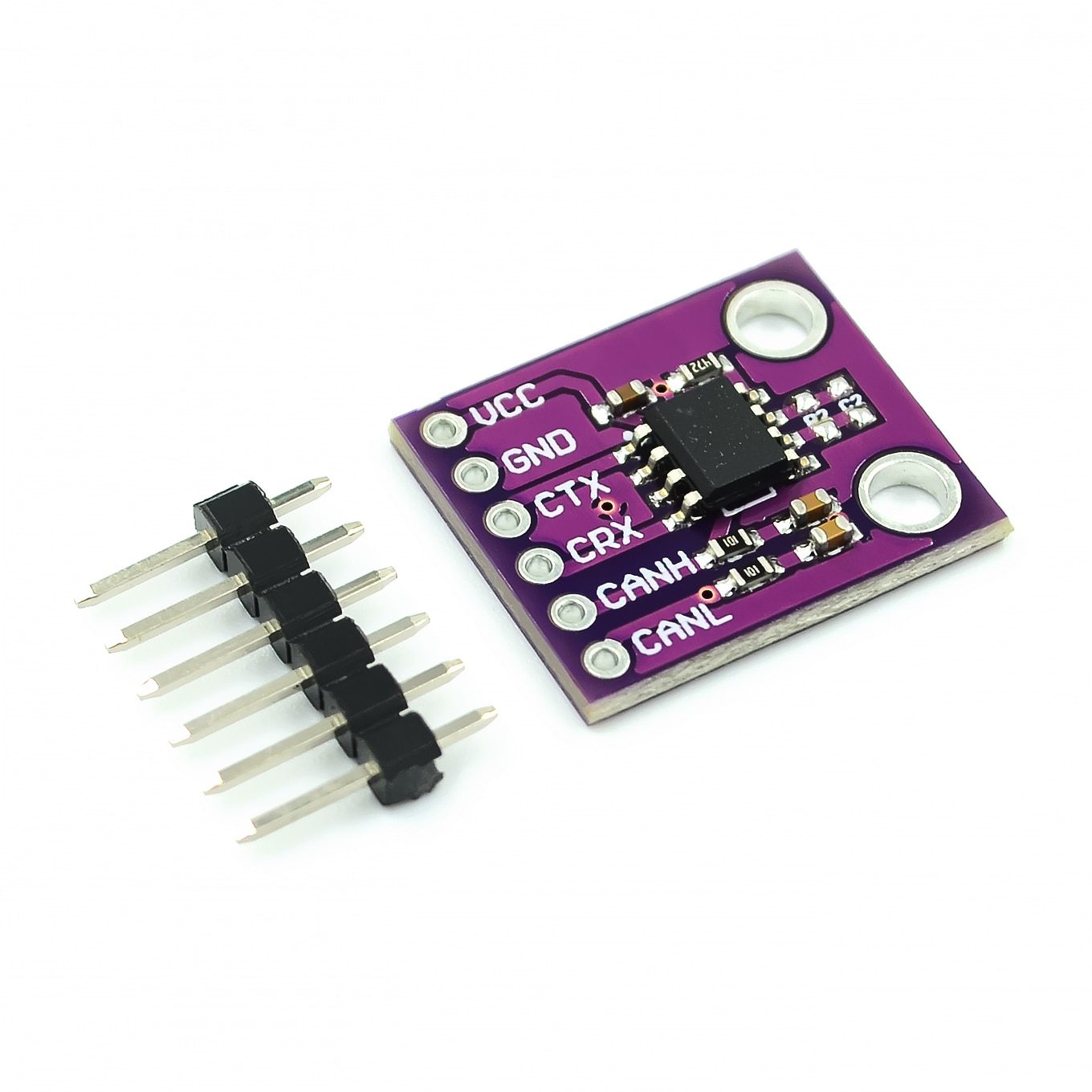
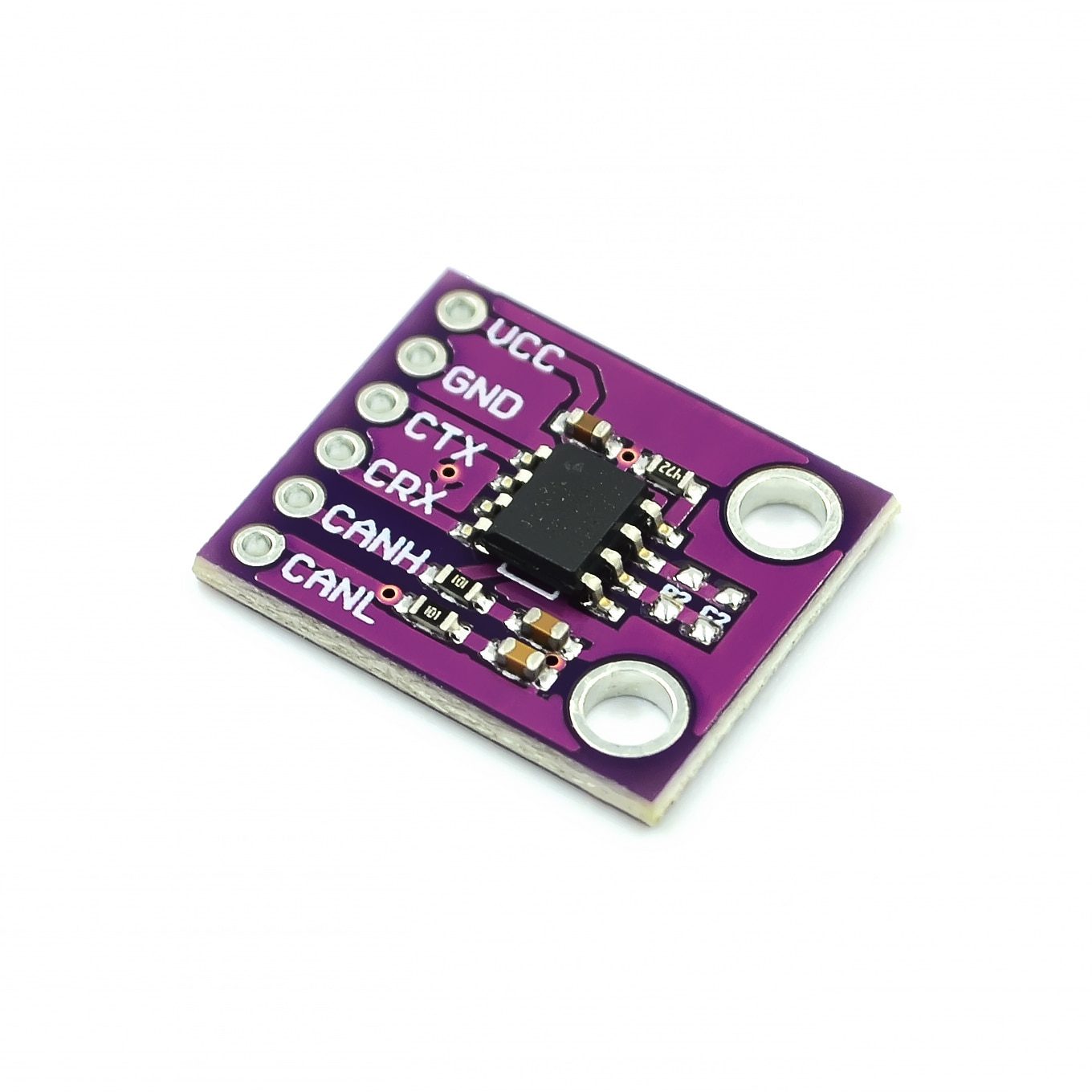

CJMCU-2551(MCP2551) CAN protocol controller high-speed bus interface module
CJMCU-2551 is a fault-tolerant, high-speed CAN device that can be used as a CAN protocol controller and the physical bus interface. MCP2551 provides differential receive capability to the CAN protocol controller, which is fully in line with ISO-11898 standards, including energy 24V requirements.
Typically, each node on the CAN system must have a device, the digital signal is converted into a CAN controller generates a signal for bus transport. It also provides high voltage spikes between the CAN controller and CAN bus joined the buffer, these high-pressure spikes may be generated by an external device.
Support 1MB / S’s run rate.
- Meet the ISO-11898 standard physical layer requirements.
- Suitable for 12V and 24V systems. Slope external control, reduce RFI.
Automatic detection TXD input ground fault.
- Power-on reset and voltage brown-out protection.
- Unpowered node or Brown will not affect CAN bus.
- Low current standby operation.
* Up to 112 nodes can be connected.










Reviews
There are no reviews yet.